Ergonomie und Humanfaktoren
Im Forschungsschwerpunkt Ergonomie und Humanfaktoren arbeitet eine interdisziplinäre Forschungsgruppe aus Informatikern, Usability/UX-Forschern, Human Factors-Experten und Psychologen zusammen und betreibt primär hypothesengetriebene, experimentelle Forschung im Bereich Driver-Vehicle Interaction mit besonderem Fokus auf Usability-Forschung für intelligente Benutzerschnittstellen und der Mobilität der Zukunft.
Aktuelle öffentlich- und industriefinanzierte Projekte bearbeiten Forschungsfragen im Bereich automatisierter Fahrzeuge/Shuttlebusse mit Erweiterung in die dritte Dimension (urbane Luftmobilität, Drohnen). Das Spektrum des Teams deckt die gesamte Bandbreite von Pervasive Computing-Anwendungen und Ubiquituous Systems ab, z. B. multimodale Interaktion, adaptive und erklärbare (KI-)Systeme, Schätzung des Vitalzustands aus psychophysiologischen Messungen, Technikvertrauen/-akzeptanz, Absichtserkennung/Intention Recognition, Situationsbewusstsein, Datenerfassung im Fahrzeug, usw.
Zuletzt wurde verstärkt an Anwendungen der erweiterten, gemischten und virtuellen Realität (AR/VR/MR) gearbeitet um neuartige und effiziente Interaktionsmetaphern zu evaluieren oder Benutzerfreundlichkeit/UX von Schnittstellen zu untersuchen. Darüber hinaus werden Studien im Feld (u. a. auch Outdoor-Teststrecke) und in (Fahr-)Simulatoren (einschließlich Wizard-of-Oz) durchgeführt.
Forschungsagenda: "Entwicklung zukünftiger Interaktionskonzepte und intelligenter Benutzerschnittstellen, die kognitive Elemente beinhalten, um die Einzigartigkeit des Benutzers zu reflektieren".
Der Schwerpunkt wird von Prof. Dr. Andreas Riener vertreten. Weitere Details unter https://hcig.thi.de/

Projekte
Mensch in Bewegung ist ein gemeinsames Projekt der Technischen Hochschule Ingolstadt (THI) und der Katholischen Universität Eichstätt-Ingolstadt (KU).
Das 21. Jahrhundert bringt drängende Herausforderungen mit sich – wie Klimawandel, Digitalisierung der Lebens- und Arbeitswelt und soziale Ungleichheit. In diesen Zeiten müssen auch Hochschulen mit innovativen Ideen zu einem positiven Wandel beitragen. Die KU und die THI stellen sich dieser Aufgabe während der fünf Jahre ihrer Projektlaufzeit und darüber hinaus.
Welche neuen Ideen gibt es für die Mobilität? Wie kann sich die Region 10 nachhaltig entwickeln? Wie lässt sich die digitale Transformation in der Lebens- und Arbeitswelt gut gestalten? Und wie kann bürgerschaftliches Engagement bei den Herausforderungen unserer Zeit helfen? Das sind die zentralen Fragen des Projekts.
Die THI ist mit ihrem technischen und wirtschaftlichen Schwerpunkt eng mit der Industrie und Wirtschaft der Region verbunden. Die KU bringt durch ihre geisteswissenschaftliche Ausrichtung insbesondere soziale, gesellschaftliche und nachhaltige Aspekte ein.
Das Projekt „Mensch in Bewegung“ wird vom Bundesministerium für Bildung und Forschung (BMBF) gefördert. Bund und Länder unterstützen im Rahmen der Förderinitiative „Innovative Hochschule“ Bildungs- und Wissenschaftseinrichtungen, die neben Forschung und Lehre auch ein Hineinwirken in die Gesellschaft zu ihrer Aufgabe machen. Diesen Auftrag bezeichnet man als „Third Mission“, also als dritte Mission der Wissenschaft.
Das Verbundprojekt „Mensch in Bewegung“ bietet den beiden Hochschulen die Chance, ihre sich ergänzenden Stärken zu bündeln und in die Region hineinwirken zu lassen. KU und THI verfolgen das gemeinsame Ziel, den Wissensaustausch (Transfer) zwischen Wissenschaft, Politik, Wirtschaft und Zivilgesellschaft zu verstärken. Die Förderung von Bund und Ländern ermöglicht es, dass die beiden Hochschulen ihre gesellschaftliche Verantwortung wahrnehmen und fruchtbarer zusammenarbeiten. Mit technologischen und sozialen Innovationen tragen sie dazu bei, Lebensqualität und Wohlstand in der Region zu sichern.
Das Teilprojekt beschäftigt sich mit der Entwicklung neuartiger „Menschmodelle“, um insbesondere zwei Problemfelder zu bearbeiten: Einerseits werden wir eine lange Zeit des sogenannten Mischverkehrs vorfinden, in der es für die Verkehrssicherheit wichtig sein wird, dass automatisierte Fahrzeuge abschätzen können, wie sich manuelle Fahrer im Straßenverkehr verhalten. Auf der anderen Seite wird die Akzeptanz automatisierter Fahrzeuge (aus Passagiersicht) stark von Faktoren wie Fahrstil und -manöver, Sicherheitsabstand, etc. des automatisierten Fahrzeugs abhängen. Hierzu sind individuelle Parameter zu ermitteln und Fahrfunktionen damit geeignet zu parametrisieren.
Ziel von AMI-AirShuttle ist die Erforschung bzw. Erarbeitung von Konzepten, Verfahren, Studien, Plänen, digitalen Lösungen, Prozessen, Genehmigungen und Geschäftsmodellen für die werthaltige und slotneutrale Integration von Flugtaxis am Flughafen München vor dem Hintergrund zukünftiger Skalierungs- und Vermarktungspotenziale der Gesamtlösung für Drittkunden. Die zugrundeliegende Leitfrage, die über alle Hauptarbeitspakete bearbeitet wird, ist: Welche Voraussetzungen müssen erfüllt sein, um zeitnah, sicher, effizient und umweltverträglich bemannte, elektrifizierte Flugtaxis (eVTOL) in den bestehenden Betrieb des Flughafens (Use Case: MUC) zu integrieren und einen kommerziellen Betrieb von Flugtaxis auf internationalen Flughäfen starten zu können?
Ziel von BARCS ist die Entwicklung eines Konzepts für den wirtschaftlichen Betrieb autonomer Shuttlebusse durch den Einsatz von Teleoperation und der Weiterentwicklung bestehender Technologien. Hierbei kommt insbesondere dem Aufbau eines Versuchsträgers und dessen Evaluation eine besondere Bedeutung zu. Final sollen auch die technischen und nutzerbedingten Anforderungen an hochautomatisierte Fahrzeuge im Projekt erforscht werden, um durch entsprechende Entwicklungen autonome Shuttlebusse in Bayern flächendeckend und wirtschaftlich in den öffentlichen Personennahverkehr (ÖPNV) integrieren zu können. Ziel ist es erste Grundlagen für einen teleoperierten/lokalautonomen Betrieb zu schaffen und niedrig frequentierte ÖPNV-Strecken mit geringem Ressourceneinsatz erschließen zu können. Auf einem Funktionsträger sollen diese Ziele insbesondere unter Einsatz von Künstlicher Intelligenz (KI), 3D-Umfelderfassung und Objekterkennung, sowie Sensorfusion verschiedener 3D-Sensoren wie Stereokameras und LIDAR erreicht werden.
Mit dem Vorhaben SUE wird ein erster Prototyp eines hochautomatisierten Personenshuttle, eines People Movers realisiert, der über KI-Verfahren anhand von drei fusionierten Lokalisierungstechnologien autonom betrieben wird. Dieses Konzept ist neu und einzigartig und wird in SUE entwickelt. Somit wird über dieses Vorhaben ein innovatives autonomes Shuttle entwickelt, das auf Basis des neu beschlossenen deutschen Gesetzes zum autonomen Fahren ohne menschliche Überwachung genutzt werden kann. Derartige Fahrzeuge dürfen nach den neusten Gesetzen ab 2022 sogar in einen Regelbetrieb gebracht werden.
Zudem sind auch Innovationen im Bereich der funktionalen Sicherheit (FuSi) für autonome Fahrzeuge in SUE zu erwarten. Diese sind z. B. neue Prüfansätze für hochautomatisierte Fahrzeuge mit KI-Softwaremodulen oder die Erarbeitung und Veröffentlichung eines Leitfadens für die Herausforderungen mit den entsprechenden Problemlösungen bei der Einführung eines autonomen Shuttles im städtischen ÖPNV.
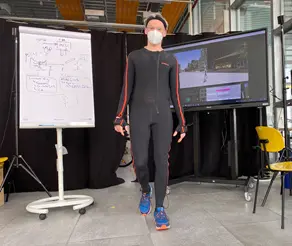
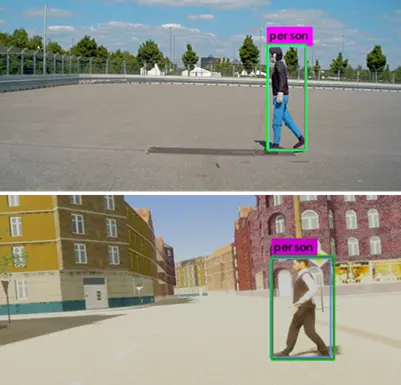
MIRASOFT widmet sich in drei Teilprojekten (TPs) Problemen der Absicherung automatisierter Fahrfunktionen. TP1 beschäftigt sich mit der Modellierung des Verhaltens ungeschützter Verkehrsteilnehmer (UVTs, z. B. Radfahrer, Fußgänger, eScooter-/eBike-Fahrer, uvm.) in Kreisverkehren und Kreuzungssituationen und unter besonderer Berücksichtigung von Witterungsverhältnissen. Durch Nutzerstudien in unterschiedlichen Realitätsgraden werden Bewegungsmuster von Probanden aufgezeichnet, um zu validieren, in wie weit das Verhalten in virtuell durchgeführten Versuchen der Realität entspricht. In weiterer Folge werden diese Daten genutzt, um UVT-Verhalten durch statistische Verfahren zu modellieren. Ziel ist es, realistische UVT-Modelle für die Simulation zu erzeugen. In TP2 werden kritische Situationen aus Fahrersicht untersucht, wobei hier nicht nur die Absicherung, sondern auch eine verbesserte Interaktion zwischen Fahrer und Fahrzeug im Fokus steht. Durch den Einsatz von Augmentierung und physiologischen Sensoren soll durch „Driver State Assessment“ das Situationsbewusstsein von Fahrern verbessert werden und zu einer sichereren Bedienung führen. Weiterhin soll durch Systemtransparenz das Verständnis in algorithmisch getroffene Systementscheidungen erhöht werden. TP3 beschäftigt sich vorbereitend mit der Integration von TP1/TP2 in eine gemeinsame „Mixed Reality“-Versuchsumgebung. Aus Konsistenzgründen wird dabei auf das Open Simulation Interface (OSI) gesetzt und Testmethoden auf Basis der in der Aufbauphase gewonnenen Projektergebnisse integriert.