
Im Bereich autonomer, unbemannter Flugsysteme (UAVs) gewinnen lernbasierte Planungsverfahren zunehmend an Bedeutung. Die kürzlich veröffentliche Publikation von
B. Salamat, D. Mattern, S.-S. Olzem, G. Elsbacher, C. Seidel und A. M. Tonello, “GMP3: Learning‑Driven, Bellman‑Guided Trajectory Planning for UAVs in Real‑Time on SE(3)” zeigt eindrucksvoll, wie der Ansatz GMP³ durch verteiltes, verstärkungslern‑basiertes Lernen eine kontinuierliche Verbesserung der Trajektorien‑Qualität erreicht – anders als klassische Verfahren, die nur punktuelle Fortschritte liefern.
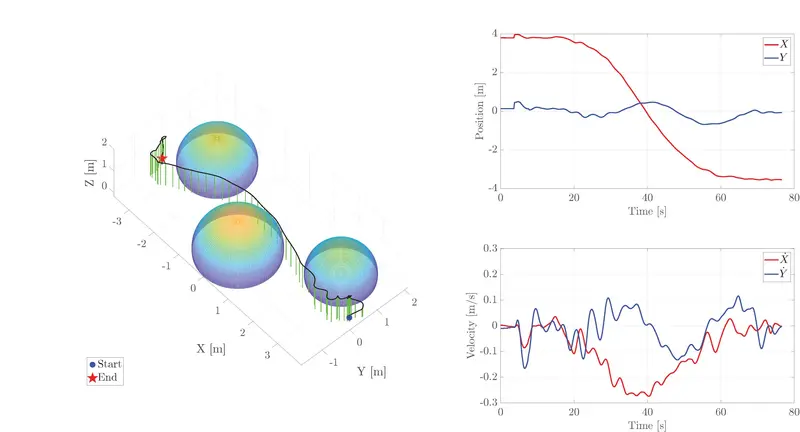
Im Zentrum steht die Reinforcement‑Learning‑gestützte Verfeinerung von Flugtrajektorien unter einer gemeinsam genutzten SE(3)‑sensitiven Zielfunktion, bei der Translation und Rotation simultan optimiert werden. Diese ganzheitliche Optimierung ist für autonome Flugsysteme besonders relevant, da hier Lage und Orientierung eng gekoppelt sind. So führt GMP³ zu höherer Stabilität, Effizienz und Präzision.
Vorteile gegenüber klassischen Methoden
Vergleichende Auswertungen ergeben:
- Klassische Anytime‑Optimierungsverfahren zeigen Fortschritte überwiegend zu fest geplanten Verfeinerungsschritten, also diskontinuierlich.
- Sampling‑basierte lernende Baselines benötigen oft deutlich mehr Iterationen, um vergleichbare Ergebnisse zu erzielen.
- GMP³ nutzt einen Bellman‑geführten Lernansatz, wodurch die Optimierung gleichzeitig Translation und Rotation adressiert und eine gleichmäßige, kontinuierliche Qualitätssteigerung ermöglicht.
Die gezeigten Ergebnisse verdeutlichen das Potenzial lerngetriebener, vernetzter Optimierungsverfahren für komplexe Bewegungsplanungsprobleme autonomer Flugsysteme. Gleichzeitig wird deutlich, wie interdisziplinäre und institutübergreifende Zusammenarbeit entscheidend dazu beiträgt, unterschiedliche Expertisen aus Robotik, maschinellem Lernen, Regelungstechnik und Optimierung in ein kohärentes Forschungsprojekt zu integrieren – ein Schlüsselfaktor für den Erfolg von GMP³. Zum Paper




